“Jugando a 3 en raya con Matatalab” en 1º de Saucedilla
Autora: Ruth Mª Sánchez Benito.
Alumnado y localidad: 1º de Primaria de Saucedilla.
Áreas: ITED Y Ed. Física.
Objetivos principales:
- Aprender a jugar a las "3 en raya", utilizando el lenguaje de programación de los robots Matatalab Coding Set.
Recursos utilizados:
- Pizarra digital.
- MATATALAB Coding Set.
- Papel y lápiz.
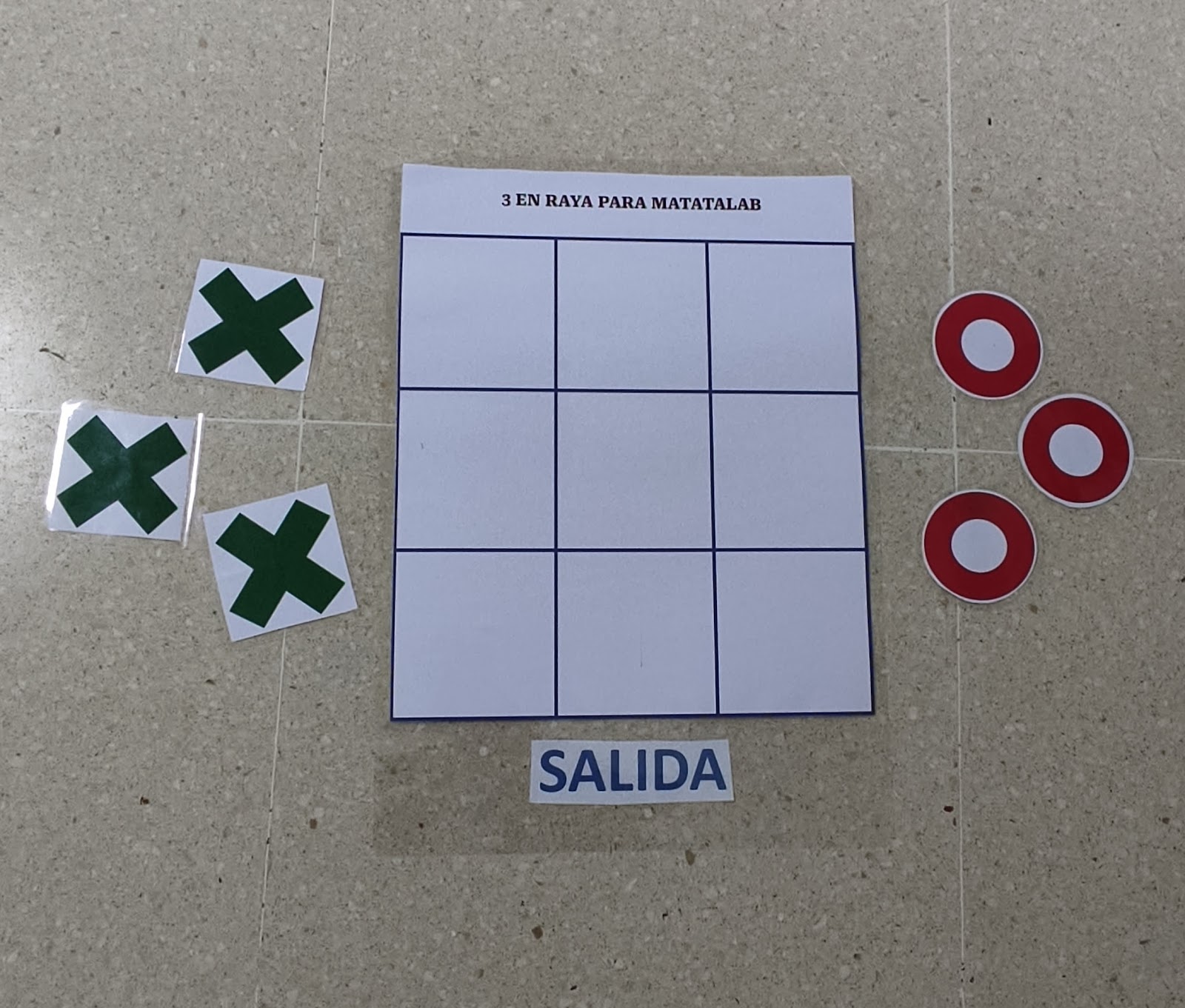
- Panel y fichas de suelo elaborado por la docente.
- 15 sesiones (12 sesiones con el alumnado + 3 sesiones para preparar la evidencia)
Descripción:
El objetivo final era jugar a “3 en raya” en un tablero de con casillas de 10 x 10 cm por donde podría moverse el robot, pero antes era necesario dedicar algunas sesiones a comprender cómo manejar el robot.
Como también he desarrollado la misma actividad con el grupo de 2º de Primaria de la misma localidad, hemos utilizado el mismo tablero de suelo y las mismas fichas, por lo que directamente procedí a introducir la actividad.
Primera sesión:
Durante esta primera clase, estuvimos explicando las reglas del juego de “3 en raya” en la pizarra digital, y después jugamos varias partidas sobre papel, con distintas parejas para asegurarnos de que todos conocían las reglas del juego.






Segunda sesión:
Fue en esta segunda sesión donde les dije que íbamos a jugar con un robot al “3 en raya robótico”, pero que antes debíamos aprender a manejar el robot y para eso, teníamos que aprender a movernos como él.
Les expliqué que nuestro robot sigue cuatro órdenes muy sencillas:
Ir hacia adelante.
Ir hacia atrás.
Girar a la derecha.
Girar a la izquierda.
A continuación, en el propio aula practicamos estos movimientos todos en grupo:

Seguidamente, fuimos a la biblioteca y les mostré los paneles de suelo, donde seguimos practicando los mismos movimientos varias veces:


De esta forma pude comprobar que había varios alumnos/as que no tenían interiorizada la lateralidad, por lo que les escribí con rotulador en la mano las letras D (en la derecha) e I (en la izquierda) para poder comenzar a jugar.

A continuación les enseñé las fichas que íbamos a utilizar y explicamos las órdenes o comandos que en un futuro utilizarían con el robot, pero que primero debían practicar con ellos mismos jugando en los tableros: (ir hacia adelante, girar a la derecha, girar a la izquierda, ir hacia atrás).






La primera partida la jugamos todos juntos para ver cómo era. A continuación hicimos dos grupos y comenzamos a jugar en los dos tableros de suelo disponibles:
Por turnos en grupos de 5/6 con dos equipos cada uno (3 y 2/3 jugadores cada equipo), uno sería el robot y llevaría una ficha en la mano, y el otro le haría llevar la ficha a la casilla elegida con las siguientes órdenes orales: ir hacia adelante, girar a la izquierda, girar a la derecha, ir hacia atrás. Una vez que soltaban la ficha, había que sacar al robot del tablero por el camino más fácil.
Cuando una pareja había colocado su ficha, la siguiente empezaba su turno de colocación desde la casilla de salida.
Tercera, cuarta y quinta sesión:
De las sesiones tercera a quinta repasamos la actividad anterior con el mismo sistema de trabajo: el “robot humano” llevaba la ficha atendiendo a las órdenes orales de su compañero/a, pero en la quinta sesión añadimos un nivel más de dificultad: ahora después de soltar la ficha, el robot debía abandonar el tablero por la misma casilla de salida.
Así los alumnos y alumnas debían estar pendientes de hacia dónde miraba el robot en cada momento para dar las órdenes oportunas.
Como en la sesión anterior comprobamos que había alumnos/as que no tenían bien interiorizados los conceptos de derecha e izquierda, y jugar con un equipo de 3 era complicado, en las manos les escribimos a todos una “D” en la derecha y una “I” en la izquierda y el número de turno por equipos (unos lo llevaban escrito en rojo y otros en azul).




Así seguimos avanzando en nuestros conocimientos “robóticos”.
Sexta, séptima y octava sesión:
En la sexta sesión introdujimos las fichas de programación que teníamos fotocopiadas y plastificadas y comenzamos a dirigir a nuestro compañero-robot utilizando su propio lenguaje de programación, sin hablar.






Aunque en un principio tenía pensado aumentar la dificultad, no pude hacerlo porque ya el hecho de programar siempre desde la salida les costaba mucho trabajo.
Cuando tenían estas actividades controladas llegó el momento de presentar al robot.
Novena y décima sesión:
En la novena sesión presentamos el robot y vimos cómo funcionaba y comenzamos a jugar con nuestro tablero y nuestras fichas adaptadas al tamaño 10 x 10 cm.

Al principio, aprendimos todos juntos cómo manejar el robot. Después llegó el turno de jugar en pequeños grupos y, al grupo que no le tocaba, jugaba en los paneles de suelo.



Undécima y duodécima sesión:
En estas dos sesiones incluimos solo dos pequeñas dificultades más: la utilización de fichas numéricas y que el robot bailara donde quería soltar la ficha.




Las dificultades encontradas durante el desarrollo de esta actividad han sido sobre todo en relación a la falta de adquisición de los conceptos de derecha e izquierda con respecto a si mismos y al robot o compañero que hacía de robot, pero las solventamos escribiendo “D” e “I” en las manos correspondientes y diciéndoles a estos alumnos que se pusieran siempre mirando en la dirección del “robot” y/o al lado de sus compañeros.
También hemos encontrado dificultades a la hora de intentar programar desde una posición distinta a la salida, por la dificultad de orientación espacial de los niños, relacionada con el conocimiento de la derecha e izquierda sobre sí mismo, pero sobre todo con respecto a los demás.
Como aspectos a mejorar, podemos incluir la necesidad de trabajar más los conceptos de derecha e izquierda previamente desde el área de Ed. Física antes de introducir la robótica en el aula. También podríamos utilizar robots Tale-bot en lugar de Matatalab, que son mucho más fáciles de programar para niños tan pequeños.